Servo System
AC / DC Servo Motor & Driver
-
-
Servo System
M3 Series
AC 서보 system으로 PID 게인 파라미터의 자동 튜닝을 지원,디버깅 프리 기능 추가되어 있고
내장된 회생 에너지 흡수저항장치와 ,STO 및 다이나믹 제동 모듈(일부 모델) 추가로보다 안전하며
신뢰할수 있습니다.
이중 위치 피드백(일부 모델)의 Full Closed 루프제어를 통해 시스템의 최종 위치 정확도를 향상시킵니다.인크리멘탈 및 엡솔루트 광학식, 무베터리 멀티턴방식등의 다양한 엔코더 적용
낮은 코깅 토크
고분해능엔코더 (20bit)적용으로 정밀제어가능
다양한 통식방식지원 (RS422,485, CANopen, EtherCAT, EtherNet)
Stand Alone지원 (내장형 Controller)
STO(safe Torque off) 기능제공
종류 M3 series

■ 풍부한 제품 라인업

▪ Frame Size : 40 / 60 / 80 / 100 / 130mm
▪ Inertia : 저관성, 중관성, 고관성
▪ Power rating : 100W ~ 3.0kW
■ 저관성, 중관성, 고관성 서보모터
▪ 다양한 회전 관성옵션을 제공하여 부하대모터 관성비를 최적화하고 기계적 성능을 향상시킵니다.
| 저관성 | 중관성 | 고관성 |
| 대부분 장비에 적용가능 낮은 관성부하 빠른 가감속이 요구되는 메커니즘 빠르고 빈번한 작동 |
기계적 강성이 낮은 장비 밸트 및 타이밍밸트 부하 큰 관성부하 고속주행시 안전성확보가 필요한 장비 |
관성이 큰 밸트 부하 저속 및 고토크가 필요한 부하 관성모멘트가 큰 턴테이블 |
■ 고정밀 인코더
고성능의 엔코더 적용으로 정밀한 위치정밀도아 매끄럽고 부드러운 동작이 가능합니다.
엔코더는 간단한 배선과 강력한 간섭 방지 기능의 직렬 통신을 채택하였습니다.
20-bit 광학식 인크리멘탈엔코더 /엡솔루트 엔코더
▪ 서보모더 1회전당 분해능 1,048,576pulse/rev
▪ Multi-turn battery backup
17-bit 무전지 Multi-turn 앱솔루트 엔코더
▪ 서보모더 1회전당 분해능 131,072pulse/rev
▪ 배터리 없이 다중 회전 데이터를 기록하여 시스템 유지 관리 비용 절감
17-bit 마그네틱 인크리멘탈 엔코더
▪ 서보모더 1회전당 분해능 131,072pulse/rev
▪ 열악한 환경을 견딜 수 있는 우수한 능력
▪ 진동 억제 기능강화
참고
인크리멘탈 엔코더 : 높은 해상도를 얻을수 있으나 전원Off시 현재위치를 기억하지 못함
엡솔루드 엔코더 : 배터리를 사용하면 드라이버 전원 Off시 모터의 현재 위치를 기록할수 있습니다.
무전지 엡솔루트 엔코더 : 배터리가 필요없으며 드라이브 전원 Off시에도 모터 현재위치 기록할수 있습니다.
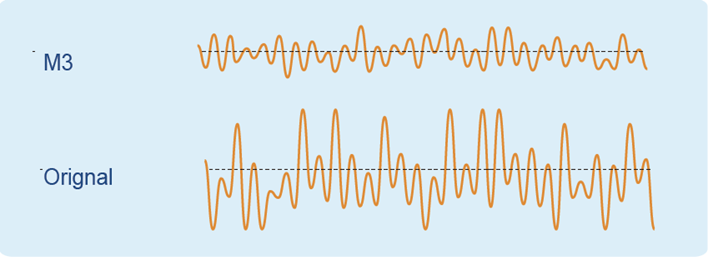
■ 낮은 코깅 토크
▪ 새로 설계된 서보 모터는 모터의 코깅 토크를 크게 줄여 모터 속도와 토크 변동을 작게 만듭니다.
▪ 최대 20비트 고정밀 엔코더로 장비가 정속 및 저속에서 보다 원활하게 작동합니다.
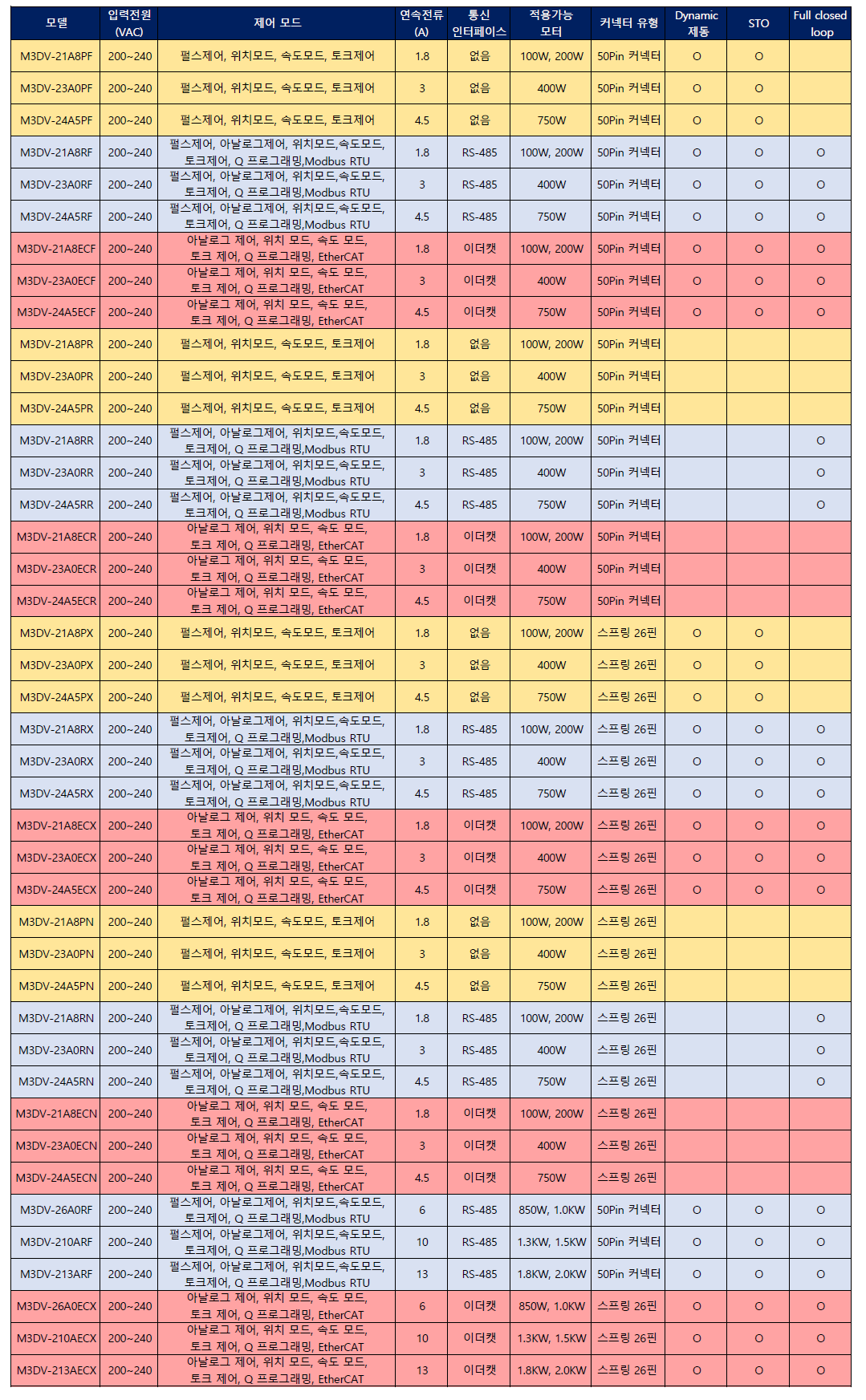
■ 2종류의 I/O 커넥터 Option


50Pin 커넥터사용 풍부한 입력 및 출력 신호를 제공. Push-in type 26Pin connector
나사조임방식으로 이탈방지 빠른연결 및 안정적
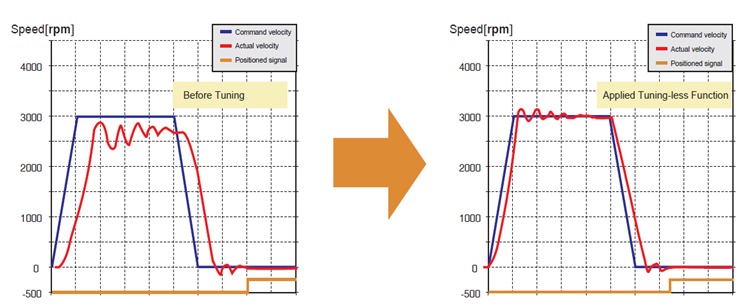
■ Tuning-less Function
▪ 새로운 서보 제어 알고리즘을기반으로 최대 부하 관성비 30배에서도 안정적으로 운전할 수 있습니다.
▪ 제어 명령의 종류(펄스/아날로그/통신 명령) 및 기계적 부하 종류에 제한이 없습니다.
▪ 이동 중 부하가 변해도 기계 장비가 안정적으로 작동할 수 있습니다
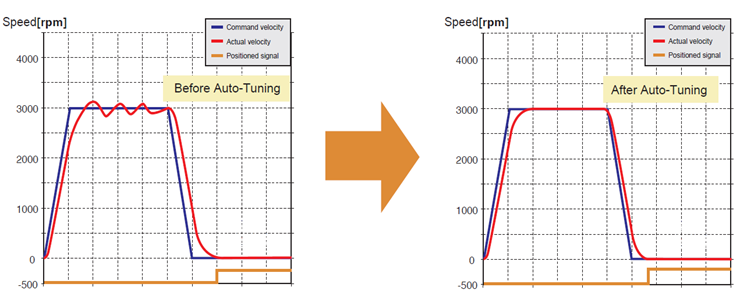
■ 오토튜닝
게인 파라미터 자동 튜닝 알고리즘을 기반으로 작동 과정에서 부하 관성(비율)이 실시간으로 자동 식별되고
게인 파라미터, 진동 억제 파라미터 및 공진 억제 노치 파라미터가 자동으로 설정됩니다.
실시간 자동 파라메터 튜닝을 통해 디버깅 시간을 크게 단축하고 시스템 응답을 개선하며 튜닝 시간을 단축하고
장비의 생산 효율성을 향상시킬 수 있습니다.
■ 공진 억제
장비의 공진을 억제할 수 있는 노치 필터 4세트 제공
▪ 자동으로 설정된 노치 필터의 1 그룹은 자동 튜닝을 통해 공진을 제거할 수 있어 디버깅 시간을 절약할 수 있습니다.
▪ 3개의 수동 노치 필터 그룹으로 공진 주파수를 소프트웨어로 분석하고 설정할 수 있습니다
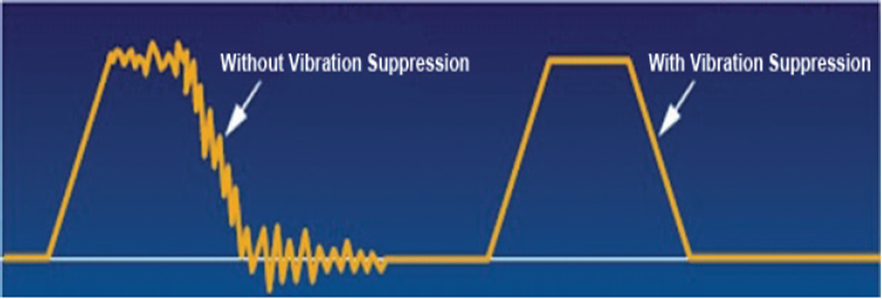
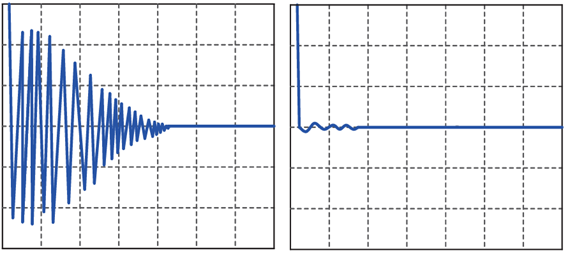
■ 기계장비 끝단 진동 억제
기계장비 끝단의 진동으로 인해 시스템을 설정하는 데 너무 오래 걸리므로 제품 정확도나 생산 효율성이 저하됩니다.
M3 시리즈 제품은 자동 파라미터 튜닝을 통해 기계적 끝단의 공진을 억제하여 튜닝 시간을 단축하고
제품 정확도를 향상시킬 수 있습니다.
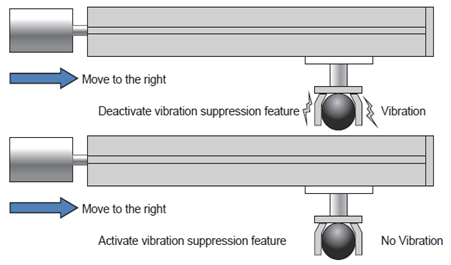
without Anti-Vibration with Anti-Vibration
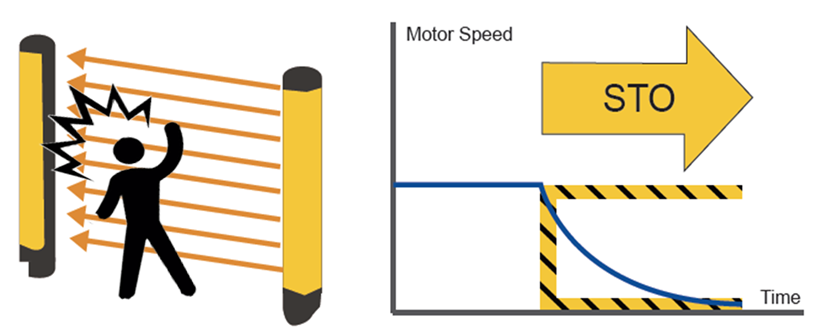
■ STO
Safe Torque Off는 하드웨어 수준의 안전 보호 기능입니다. STO가 작동하면 드라이버의 하드웨어 회로가 트리거되어
드라이버 내부의 전원 튜브를 강제로 차단하여 모터가 작동하지 못하게하고 드라이버는 활성화되지 않은 상태가됩니다.
긴급 상황에서 드라이브의 전원이 꺼지지 않는 동안 사람과 장비의 안전을 보호할 수 있습니다.
M3 시리즈는 UL61800-5-2(SIL2), IEC61508, ISO138491(PL d)을 준수합니다.
■ 다이내믹 브레이크 모듈
다이나믹 브레이크는 모터의 3상전원을 쇼트시켜 최대한 빠르게 정지시켜 장비 및 사람의 안전성을 확보합니다.
다이나믹 브레이크는 모터의 Back EMF 전류를 이용하여 작동함으로 외부에 추가적인 전원소스가 필요하지 않습니다.
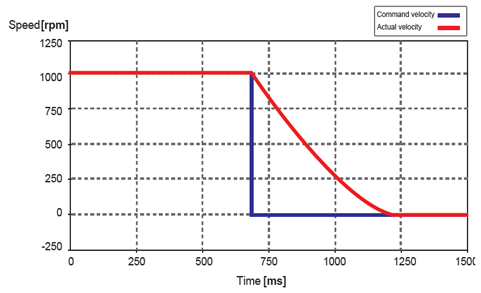
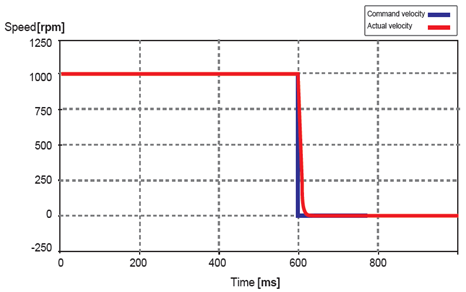
without Dynamic Brake Dynamic brake is in effect
드라이브에 오류 알람이 있으면 드라이브가 비활성화됩니다. 드라이버에 오류 경보가 발생하면 드라이버가 비활성화된 동안
이때 감속시간과 정지거리는 부하의 속도,관성, 드라이버는 모터의 3상을 단락시키고 모터 권선에서 역기전력에 의해
기구부 마찰력과 같은 외부 요인에 따라 달라집니다. 생성된 현재 토크를 사용하여 가장 빠른 속도로 정지합니다.
감속 시간을 크게 줄이고 장비와 개인의 안전을 보호합니다.
■ 에너지 흡수 저항기 내장
750W이상의 드라이버에는 회생 에너지 흡수 저항기가 내장되어 있어 모터가 감속할 때 생성된 회생 에너지를 소비하여 서보 시스템이 신속하게 정지하고
안정적으로 작동할 수 있습니다. 대부분의 애플리케이션에는 외부흡수 저항이 필요하지 않습니다.

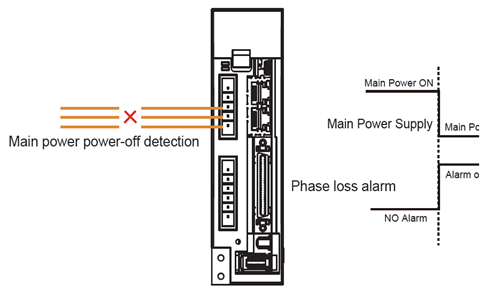
■ 주전원 장애/결상 감지
내부 AC 전원의 차단 또는 상의 단락이 발생되었을때 확인할수 있어, 서보시스템의 갑작스러운 전력이상에 의한 사고를 빠르게 보호 방지할수 있습니다
■ Full Closed loop control
부하 장비의 기계적인 실제 위치는 외부스케일을 통해 직접 피드백되며 Dual 위치 피드백을 기반으로 하는 Full Closed loop 컨트롤은 장비의
최종 위치 정확도를 향상시킵니다.
또한 서보 응답을 개선하고 기계적 진동을 억제하며 장비 신뢰성을 향상시킬 수 있습니다.

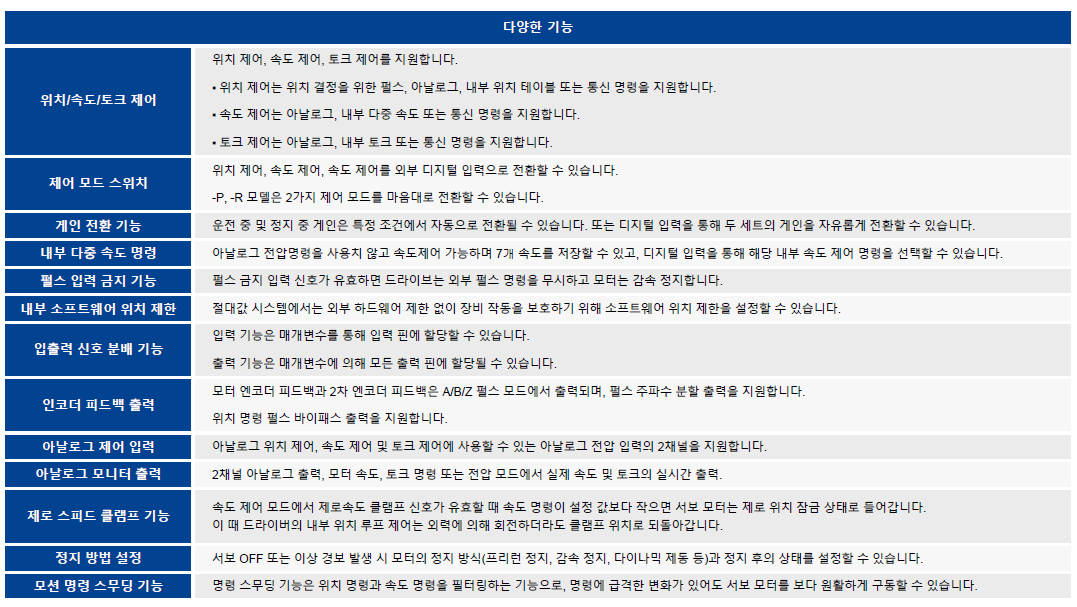
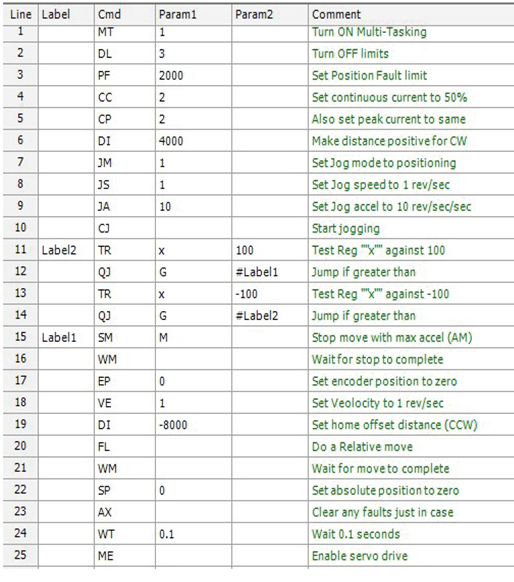
■ Q 프로그래밍
Q Programmer는 SCL 명령을 기반으로 하는 MOONS의 단일 축 모션 제어 소프트웨어입니다.
드라이브의 비휘발성 메모리에 저장후 독립 실행형으로 실행하거나 호스트에 직접 연결하지 않고도 실행할 수 있는 정교하고 기능적인
프로그램을 만들 수 있습니다.
Q 드라이브는 기계 설계자와 시스템 통합자에게 높은 수준의 유연성과 기능을 제공합니다.
• 모션 제어 명령 (상대 위치, 절대 위치, 원점 복귀 모드 등)
• 멀티태스킹
• 조건부 처리 (외부 I/O, 내부 명령)
• 연산 계산 (+, -, *, /, &, ^)
• 데이터 레지스터 조작
• 로직 모션 명령(루프, 호출 기능)
v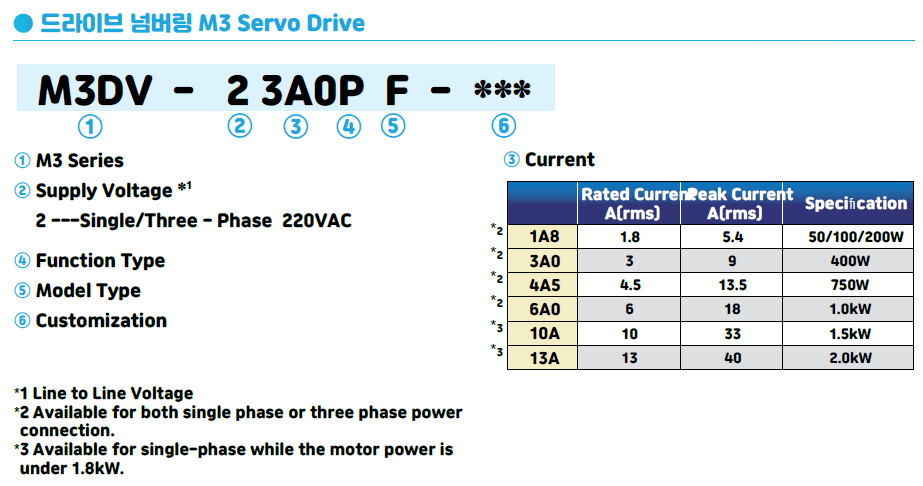
드라이버 치수 단위(mm)
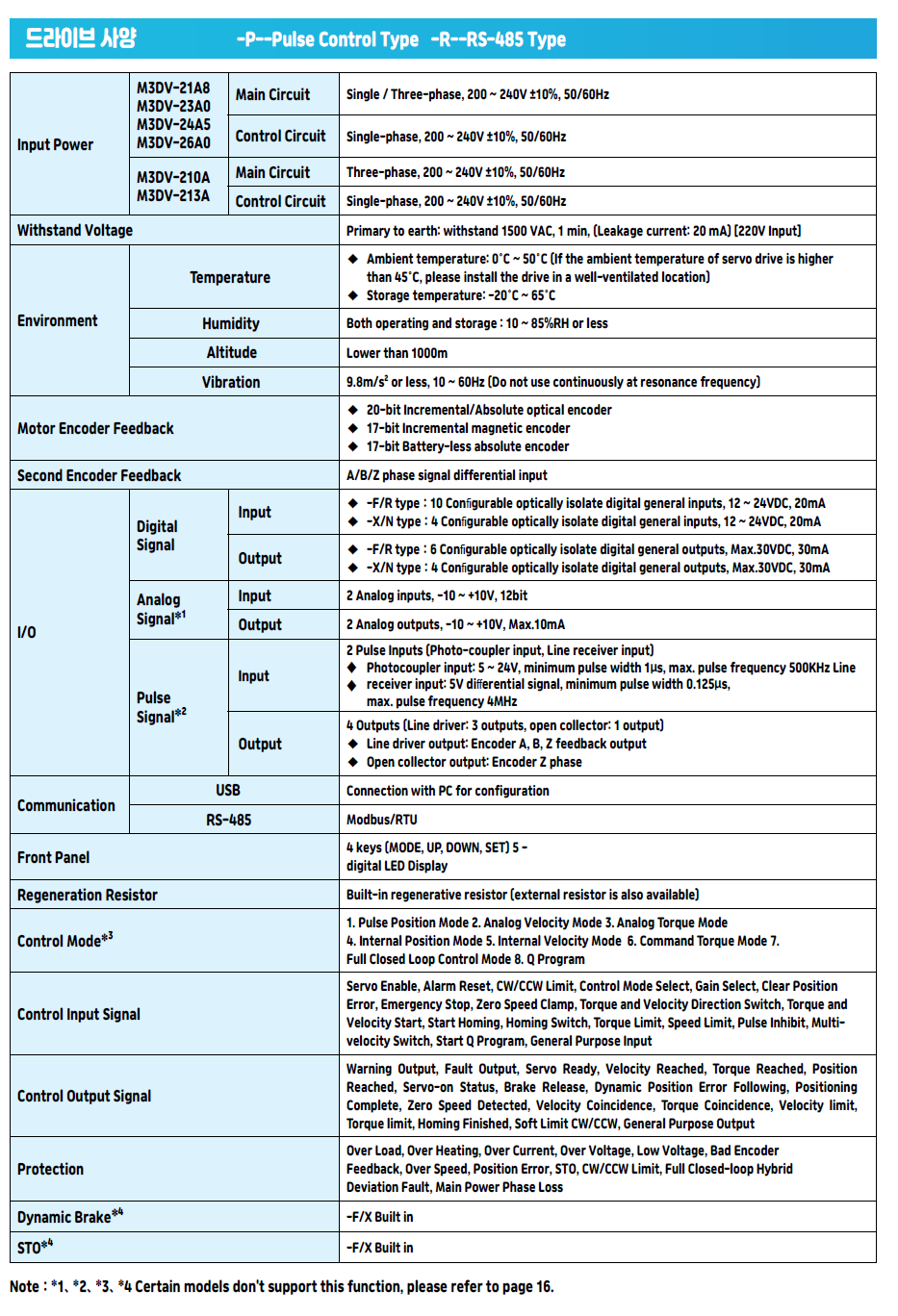
□ M3DV - 21A8 ■◆ ( 100 / 200 W )
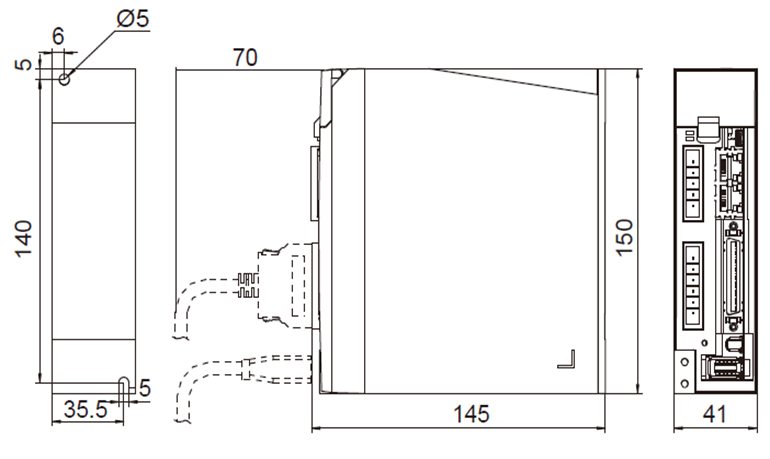
□ M3DV - 23A0 ■◆ ( 400 W )
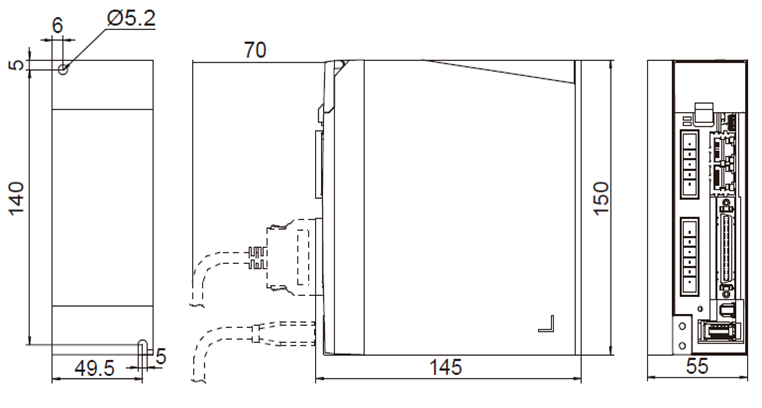
□ M3D V - 24A5 ■◆ ( 750 W )
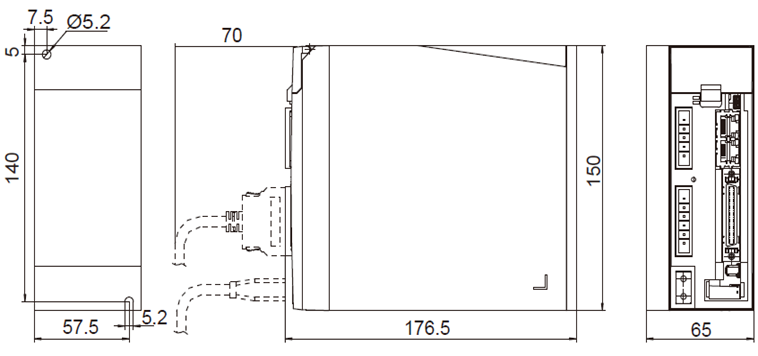
□ M3D V - 26A0 ■◆ ( 1.0 KW )
□ M3D V - 210A ■◆ ( 1.5 KW )
□ M3D V - 213A ■◆ ( 2.0 KW )
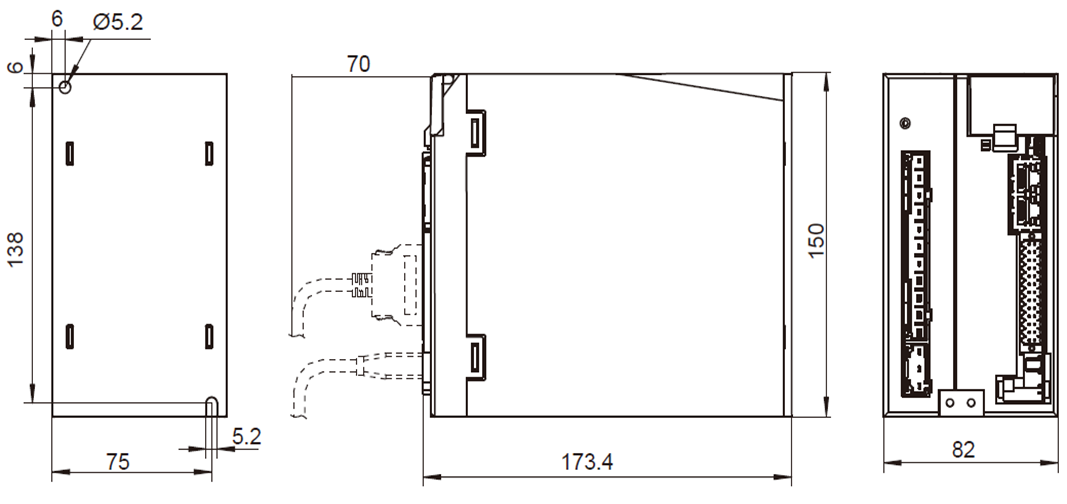
Note: ■: Control function category ◆: Model category
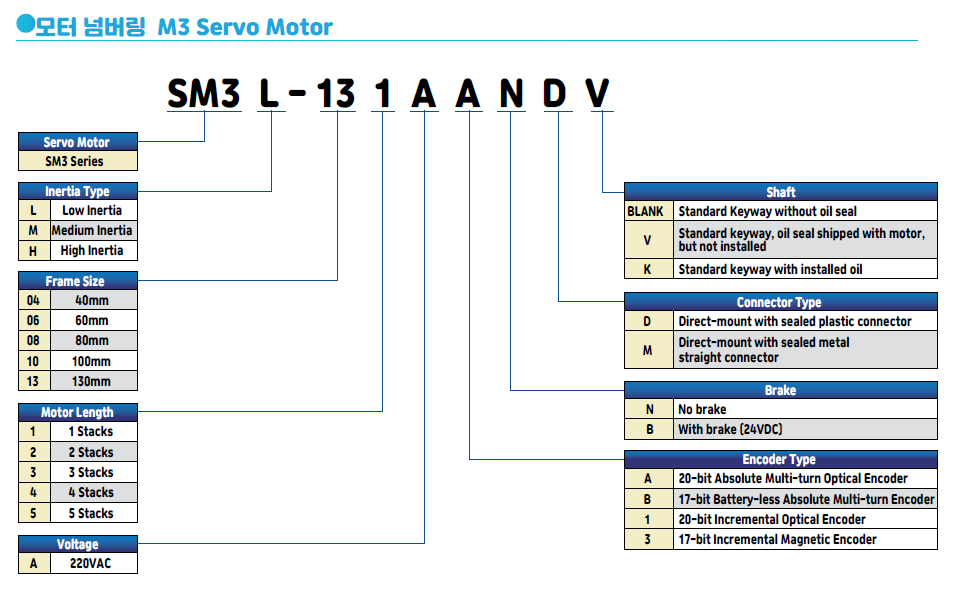
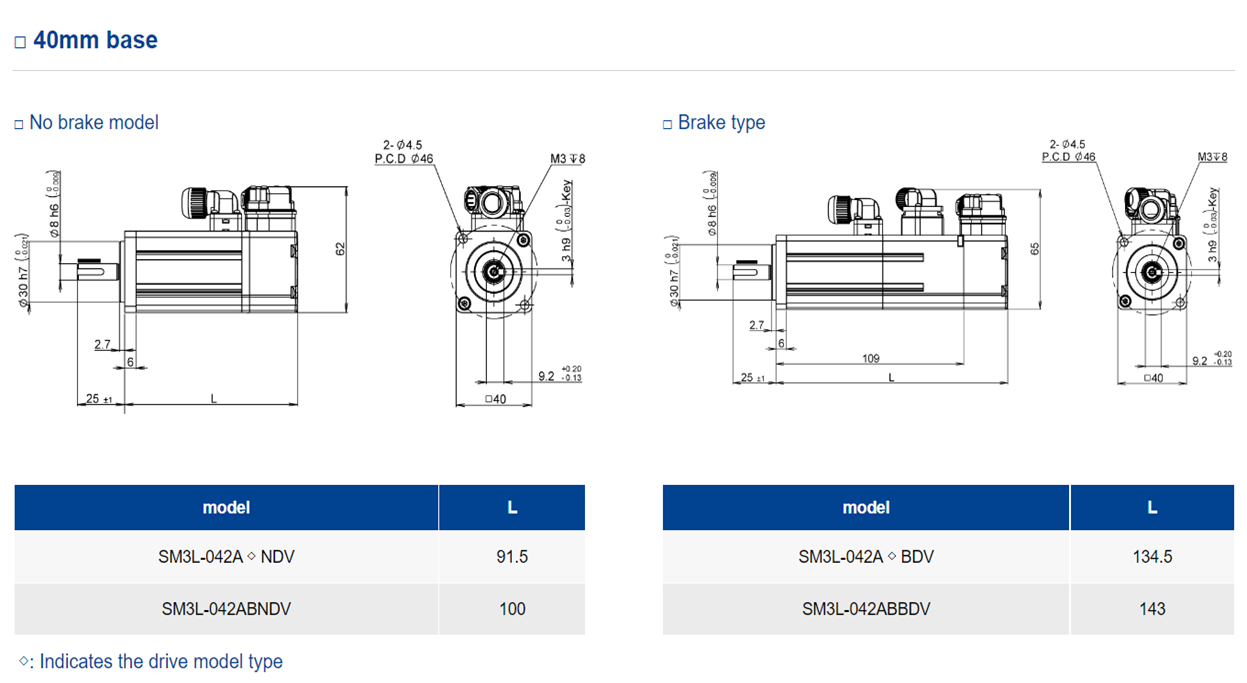
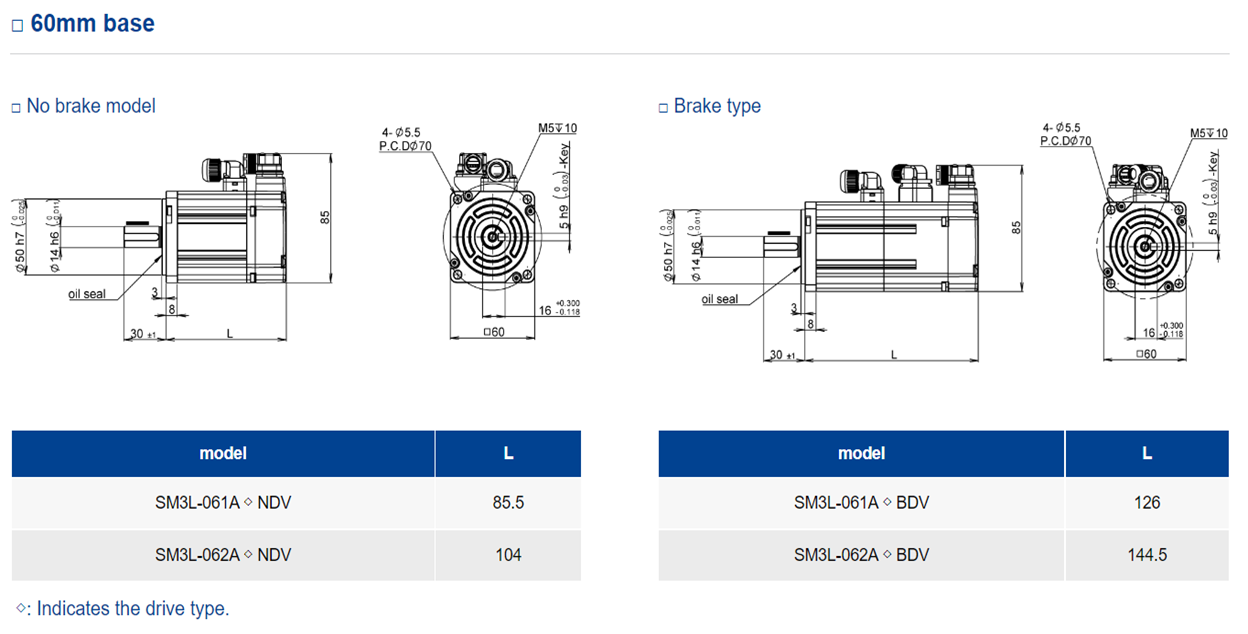
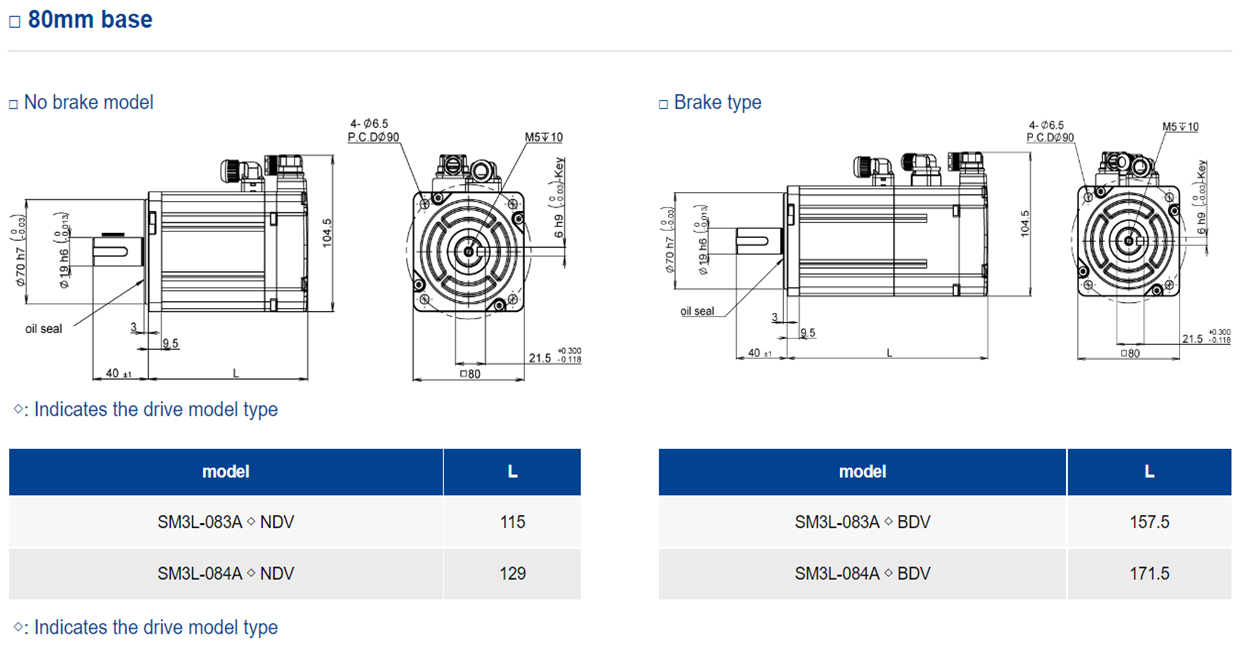
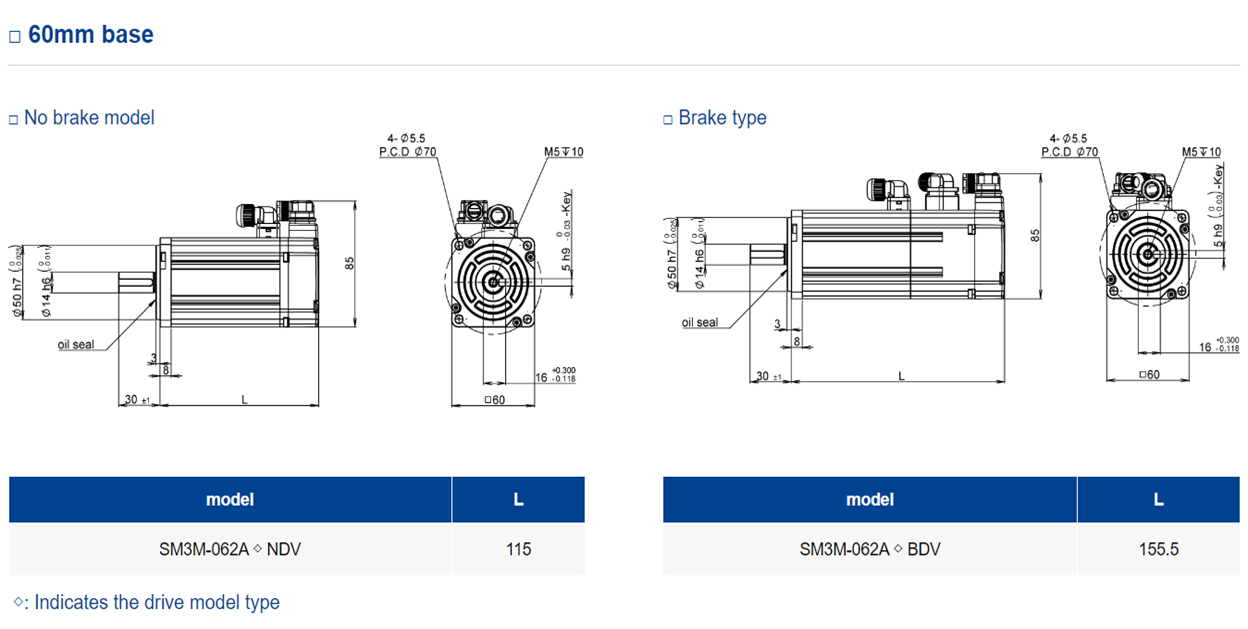
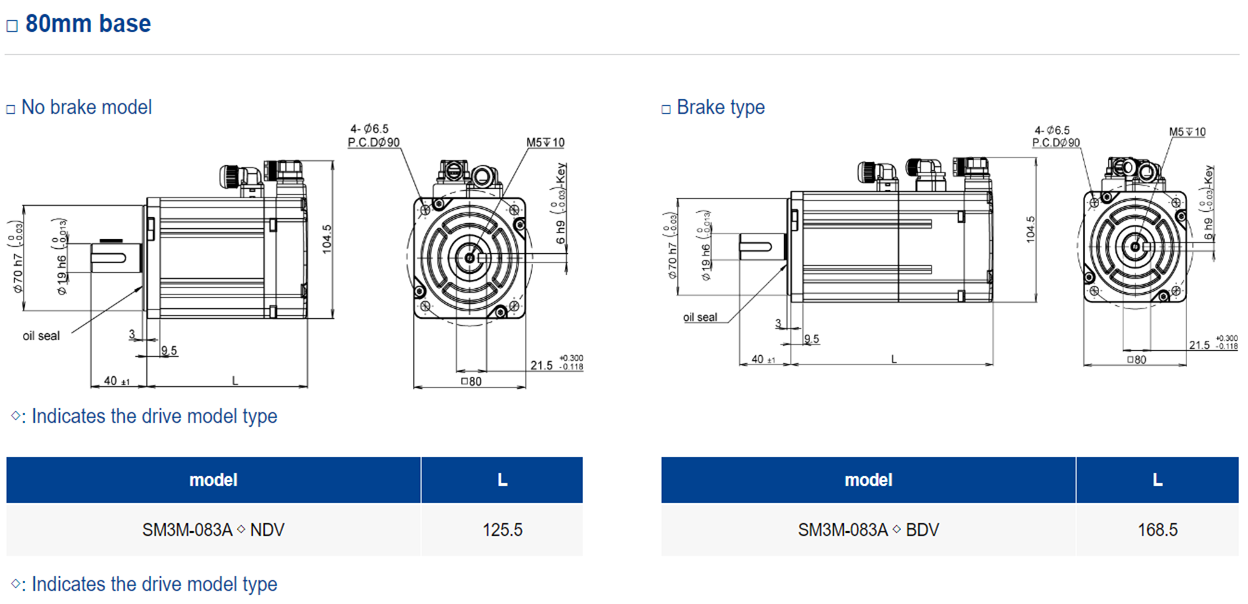
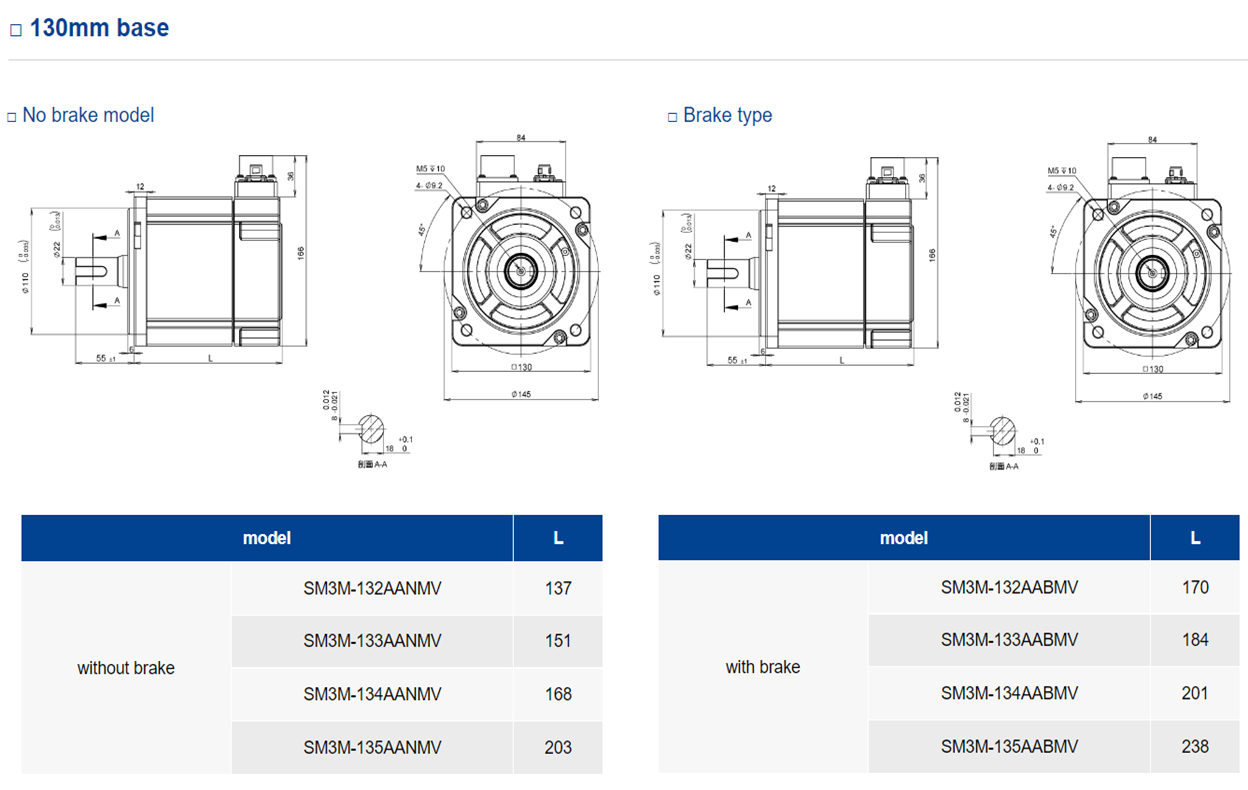
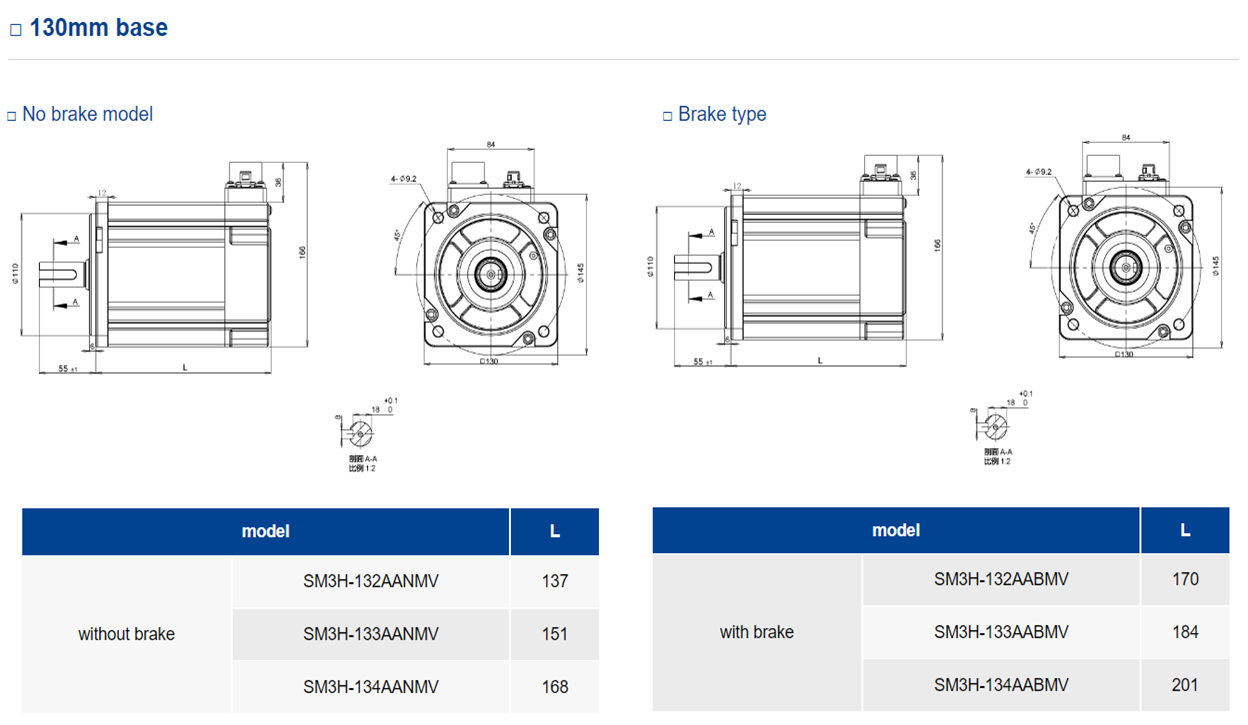
모터 치수 단위(mm)
■ Low inertia servo motor (unit: mm) (저관성모터)
■ Medium inertia servo motor (unit: mm) (중관성 모터)
■ High inertia servo motor (unit: mm) (고관성모터)
N/A